DDR3 高速缓存
配备USB 3.0高速接口和512MB DDR3高速缓存,该相机显著减少了图像数据缓冲引起的amp-glow。先进的缓冲系统确保稳定流畅的数据传输,实现不间断的成像会话。
搭载索尼 IMX662 背照式 CMOS传感器的专业天文摄影相机,为行星、太阳和月球成像提供卓越表现。

G3M662C相机具有出色的弱光拍摄、高QE值和低读出噪声特点,即使在每秒100帧的高帧率模式下也能保持低读出噪声。此外它还具有高满阱、高动态范围和高灵敏度等优势。这使得G3M662C在行星摄影、日面摄影和月面摄影中都有着不俗的性能。
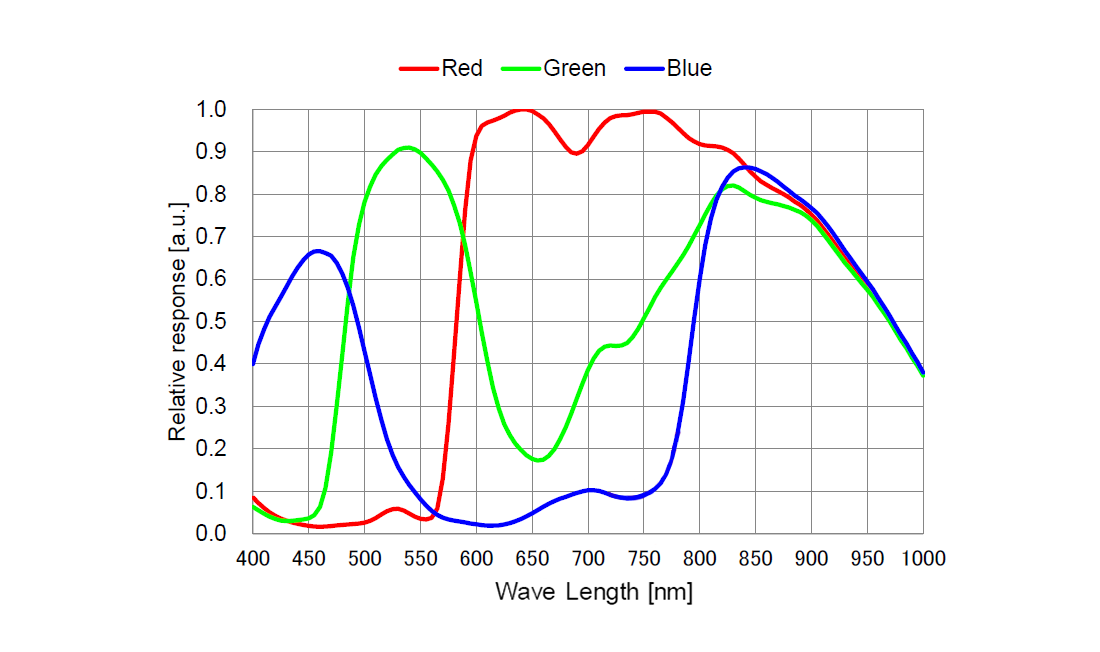
G3M662C采用索尼最新的STARVIS 2技术,传感器原始光谱响应范围达400-1000nm,配备红外截止滤光片后的有效工作范围为380-690nm。这项先进的传感器技术提供出色的低光性能和高动态范围,即使在具有挑战性的条件下也能确保清晰的天体图像。
G3M662C的传感器G灵敏度为5612mv,1/30s。其光谱灵敏度特性确保了在可见光和近红外范围内都具有出色的响应能力,特别适合行星和月面摄影应用。
G3M662C是原生12位ADC,它还具有12位输出模式2x2binning的小分辨率模式。相机还支持硬件ROI,ROI尺寸越小,帧率越高。
| 分辨率 | 6-bit 输出 | 8-bit 输出 | ||
|---|---|---|---|---|
| USB3.0 | USB2.0 | USB3.0 | USB2.0 | |
| 1920 × 1080 | 70.4 | 3.5 | 103.4 | 7.0 |
| 960 × 540 | 75.6 | 3.7 | 103.2 | 7.5 |
单位:帧/秒 (FPS)
配备USB 3.0高速接口和512MB DDR3高速缓存,该相机显著减少了图像数据缓冲引起的amp-glow。先进的缓冲系统确保稳定流畅的数据传输,实现不间断的成像会话。

G3M662C支持从 1×1 到 8×8 的数字像素合并(堆叠或平均方法)和从1×1到2×2的硬件像素合并(平均方法)。硬件像素合并比软件像素合并帧率更高。
G3M662C支持 HCG(高转换增益)、LCG(低转换增益)和HDR(高动态范围)三种模式切换。HCG模式优化了弱光性能,实现0.46e⁻的超低读取噪声;LCG模式提供39ke⁻的大满井容量,适合高亮度目标;HDR模式智能结合两种增益模式的优势,在单次曝光中实现更宽的动态范围,特别适合拍摄亮度差异极大的天体目标。
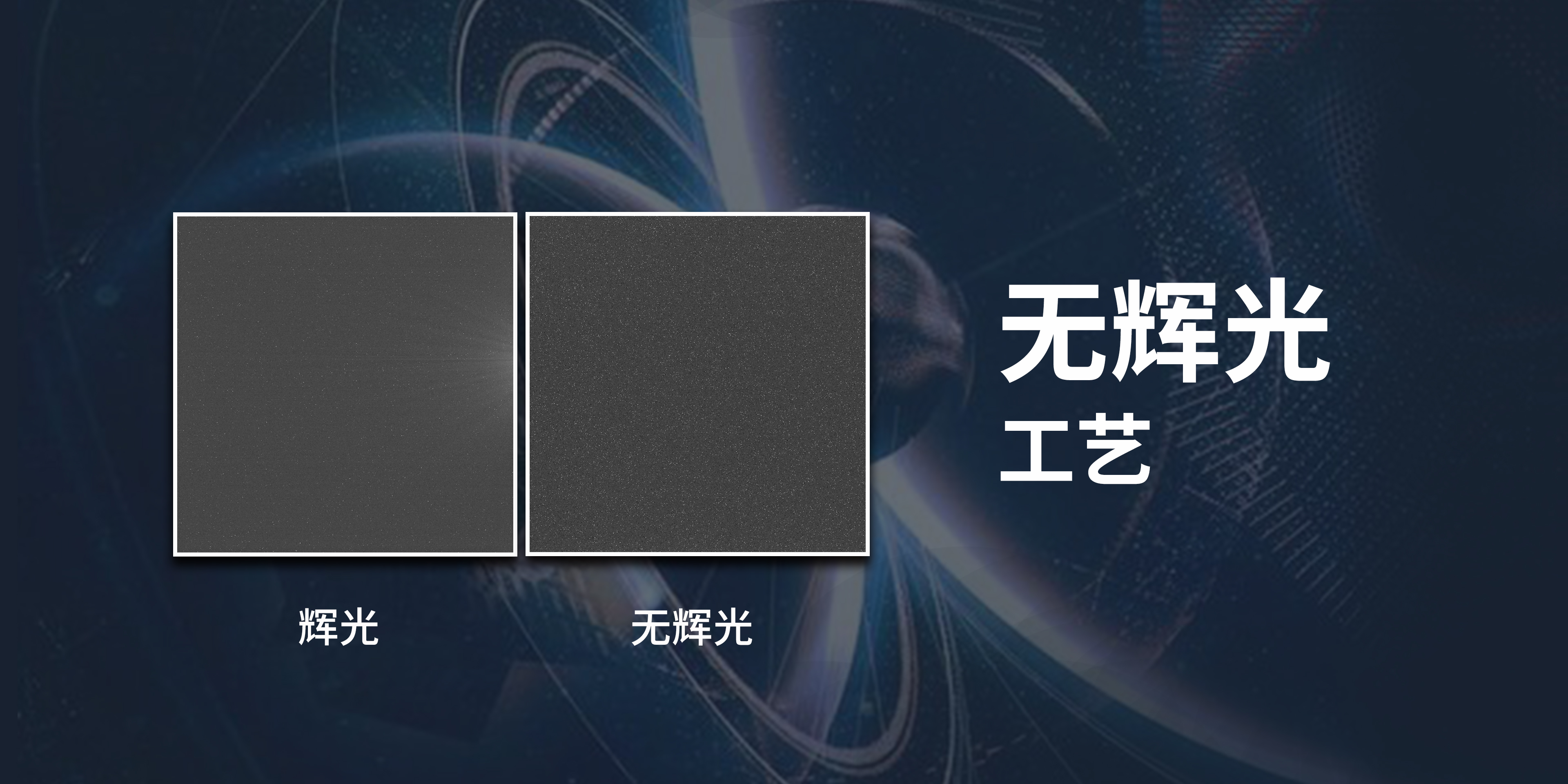
G3M662C在硬件层面实现"无辉光"。无论是长曝光还是高增益设置,您的成像结果都保持纯净清晰,没有不必要的热噪声干扰。
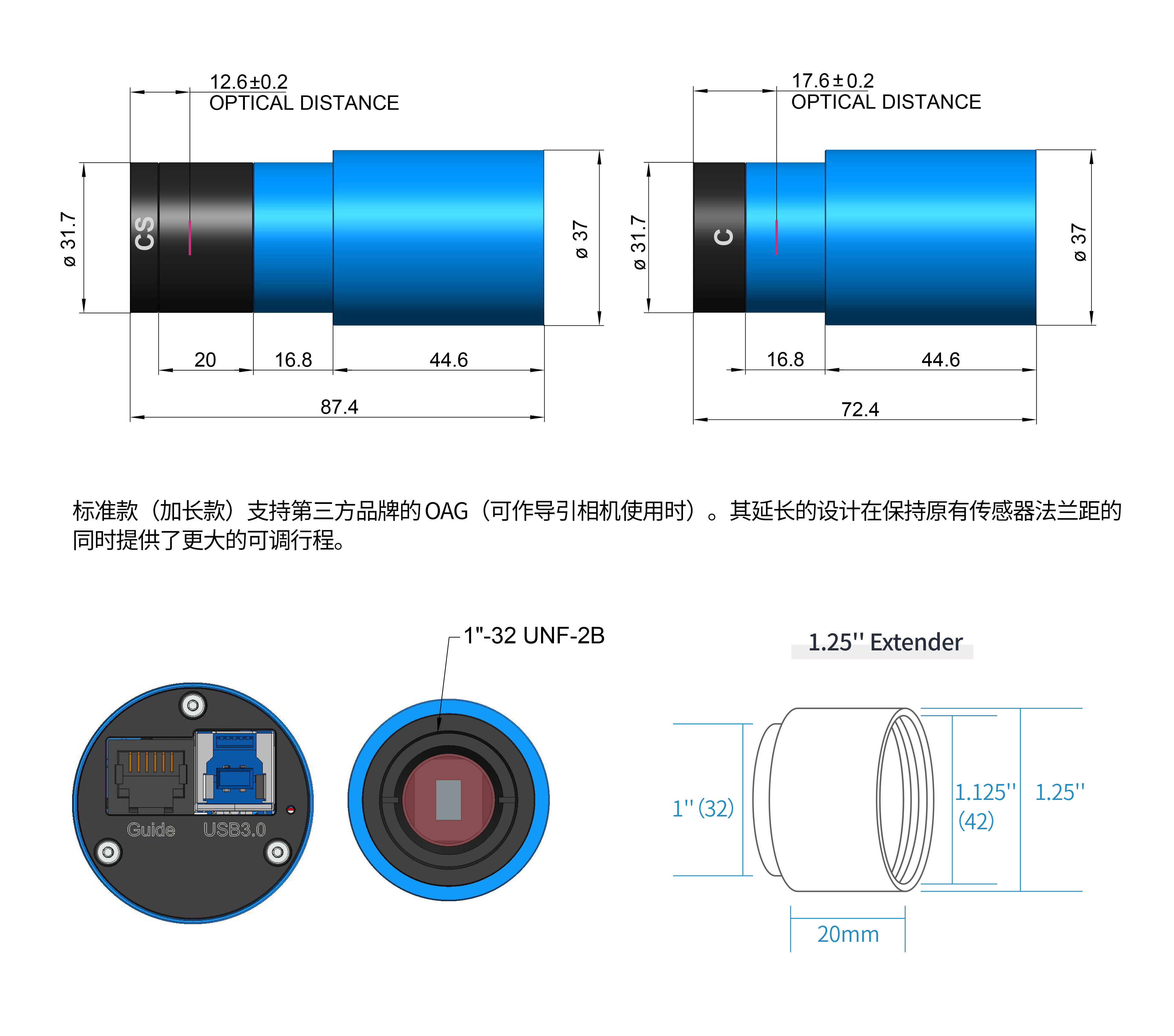
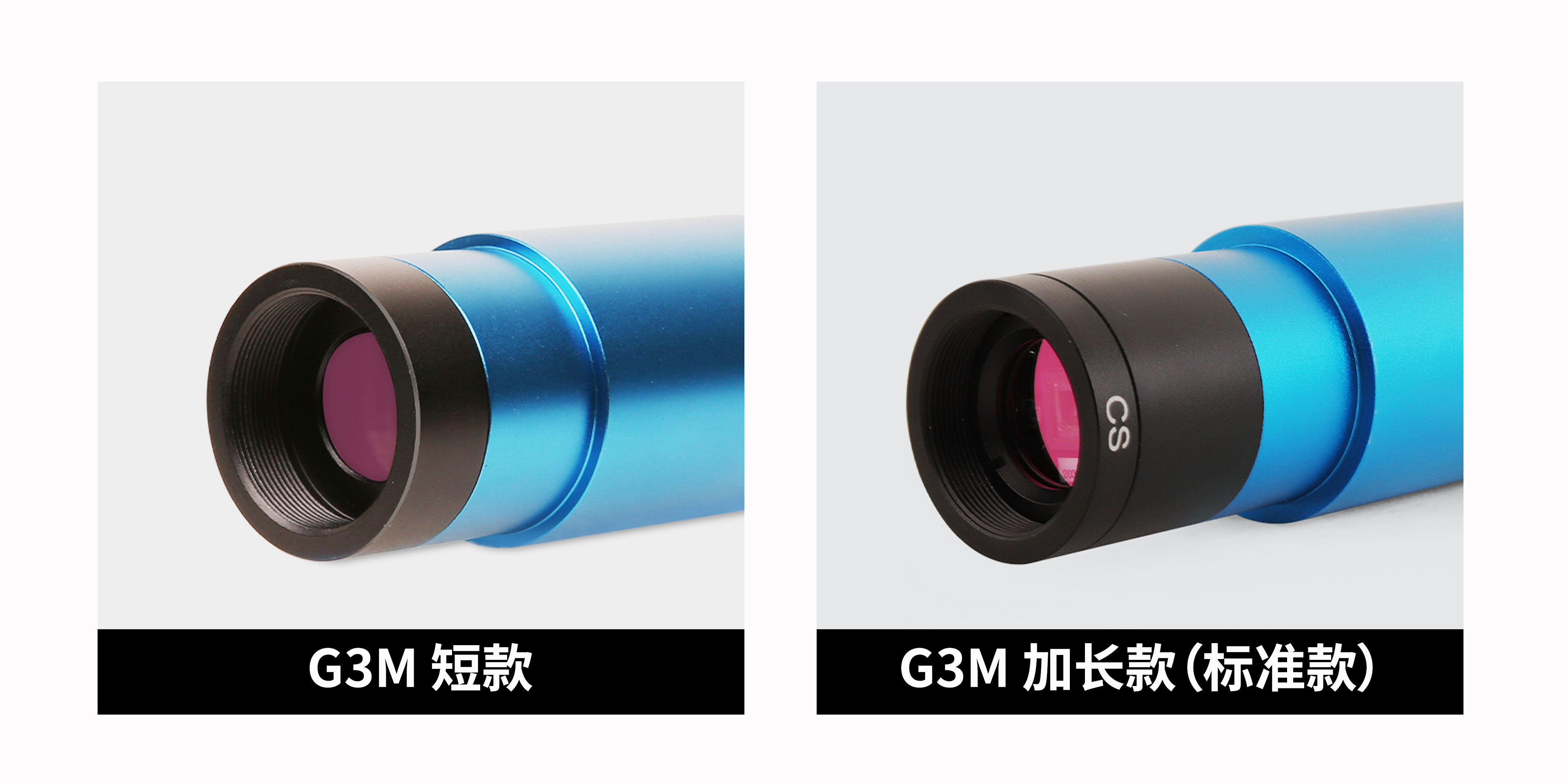
两个版本在连接1.25英寸延长筒时都可容纳1.25英寸滤镜。
相机通过USB 3.0接口获取供电。一旦使用USB 3.0数据线与主控系统建立连接,该相机即准备好进行工作。
| 最大帧率 (USB 3.0) |
16位:70.4 FPS @ 1920×1080 8位:103.4 FPS @ 1920×1080 |
|---|---|
| 读取噪声 | 0.46e⁻ (HCG模式) - 5.35e⁻ (LCG模式) |
| 满井电荷 | 39ke⁻ |
| 量子效率峰值 | >91% |
| 动态范围 | 77 dB |
| 信噪比 | 46 dB |
| 曝光时间范围 | 0.1毫秒 - 1000秒 |
| 增益范围 | 1× - 150× |
| 传感器 | 索尼 IMX662 彩色背照式 CMOS |
|---|---|
| 图像分辨率 | 210万像素 (1920×1080) |
| 像素尺寸 | 2.9μm × 2.9μm |
| 传感器尺寸 | 1/2.8英寸 (对角线 6.39mm) |
| 成像区域 | 5.57mm × 3.13mm |
| 快门类型 | 卷帘快门 |
| ADC位深 | 12位 |
| DDR3缓存 | 512MB (4Gb) |
| 光谱响应范围 | 380-690nm(带红外截止玻璃) |
| 数据接口 | USB 3.0 / USB 2.0 |
|---|---|
| 相机接口 | 1.25英寸外径适配望远镜 标准C/CS接口适配工业镜头 |
| 后截距 | 标准版CS接口:12.5mm 短款C接口:17.5mm |
| 外形尺寸 | 直径 37mm × 高度 72.4mm |
| 重量 | 70克 |
| 散热方式 | 被动散热 |
| 支持系统 | Windows XP/Vista/7/8/10/11 Mac OS X、Linux |
| SDK支持 | Native C/C++、C#/VB.NET、Python Java、DirectShow、Twain等 |
G3M662C支持HCG(高转换增益)、LCG(低转换增益)和HDR模式切换。根据您的成像需求自由配置这些模式,以优化动态范围和噪声性能。
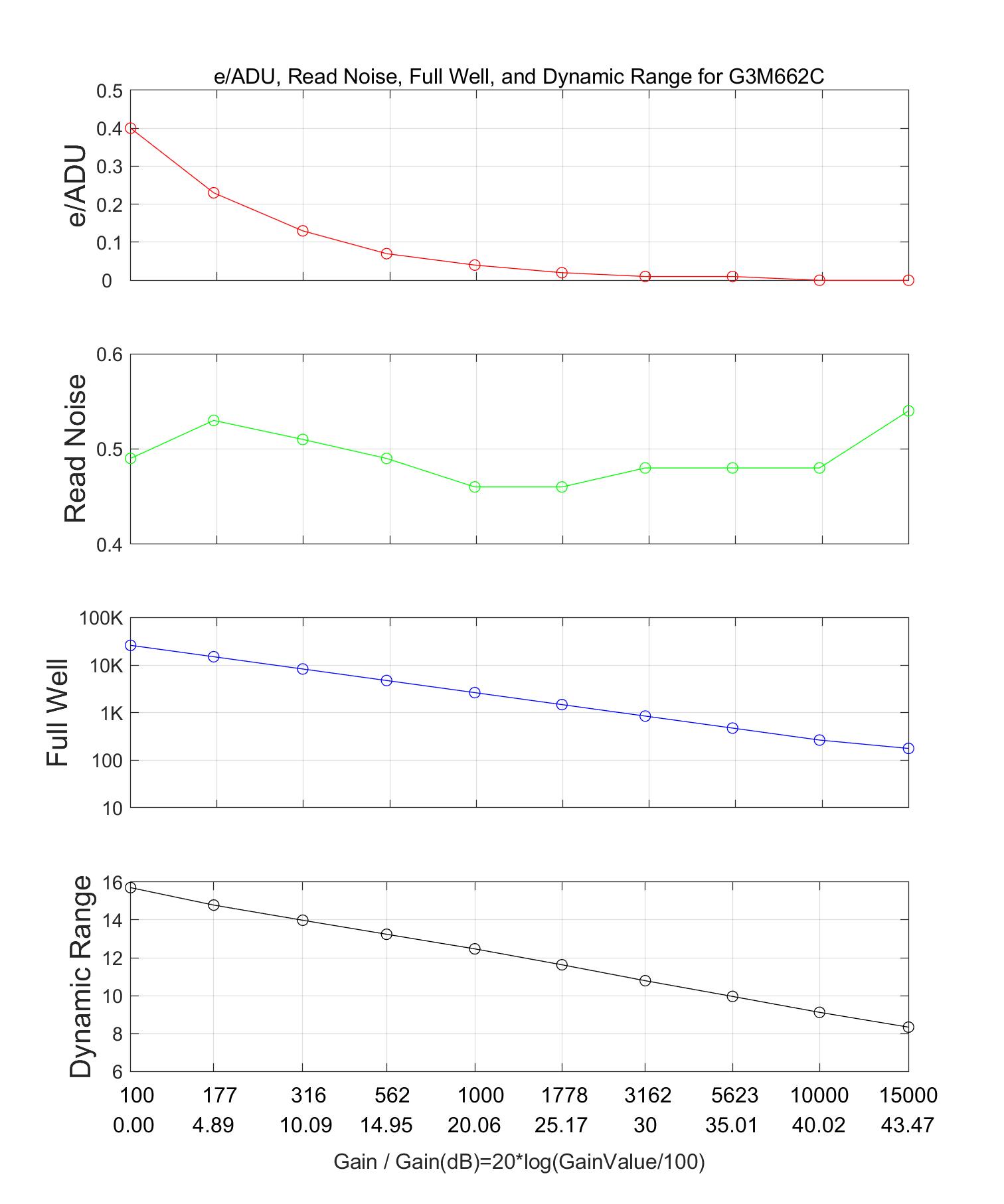
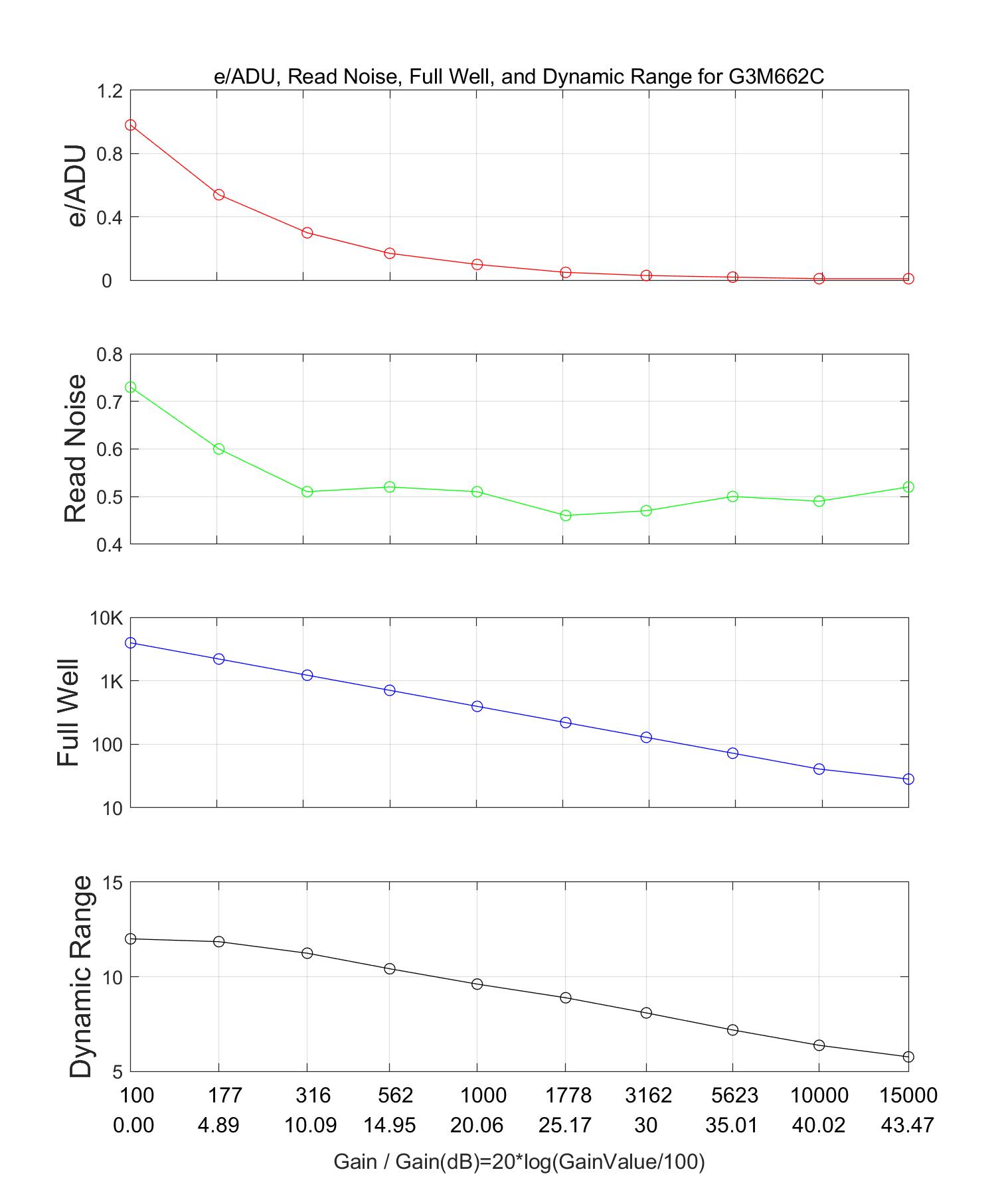
相机设置:全分辨率,RAW 12位模式
HCG(高转换增益)模式专为弱光天体摄影优化。图表展示了在不同增益设置下的性能表现: 读取噪声可低至0.46e⁻,非常适合拍摄暗弱的行星细节和月面暗区。虽然满井容量相对较小, 但极低的读取噪声使其成为深空lucky imaging的理想选择。
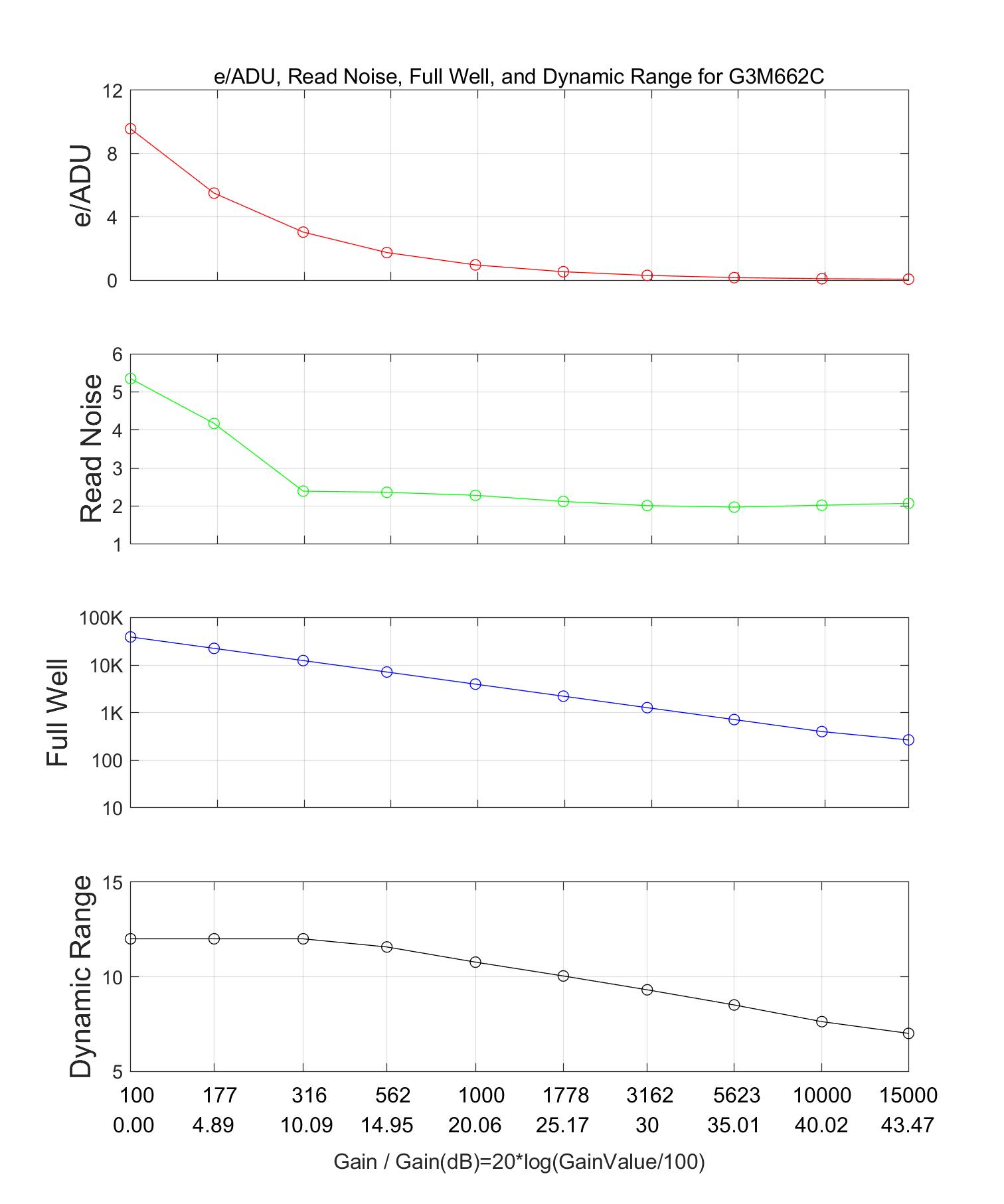
相机设置:全分辨率,RAW 12位模式
LCG(低转换增益)模式提供更大的满井容量(39ke⁻),适合拍摄高动态范围的天体。 该模式在拍摄太阳表面、明亮行星如木星和金星时表现优异,能够保留更多的亮部细节, 避免过曝。动态范围可达77dB,确保同时捕捉亮部和暗部细节。
相机设置:全分辨率,RAW 12位模式
HDR(高动态范围)模式结合了HCG和LCG模式的优势,通过智能切换实现更宽的动态范围。 该模式特别适合拍摄具有极大亮度差异的目标,如日珥、月面高反差区域等。 能够在单次曝光中同时保留亮部和暗部的丰富细节。