内置帧缓存技术
G3M664C相机内置帧缓存,有助于保持数据传输的稳定性,并有效减少辉光现象。图像数据能被缓存,无需将数据匆忙发送到接收端。这能保证在多台相机同时工作的情况下,每台相机依然能达到最大帧率。对于需要多相机协同工作的应用场景,如多通道成像或立体视觉系统,这一特性尤为重要。
搭载索尼 IMX664 背照式彩色 CMOS传感器的专业天文摄影相机,具有高分辨率、高帧率和卓越的红外响应能力,为自动导星和行星摄影提供极致性能。

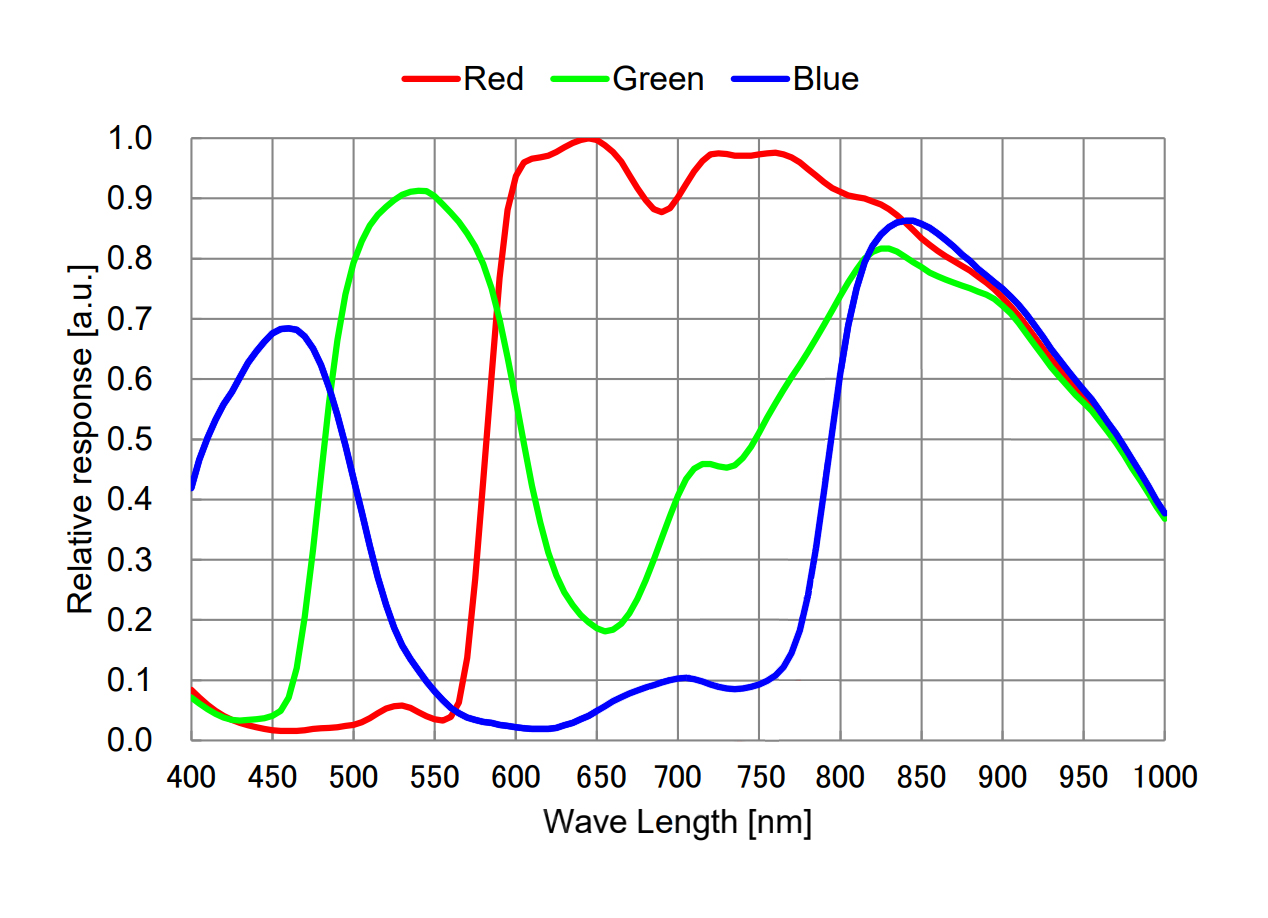
G3M664C相机具有高效的红外光捕捉能力,在550nm处具有非常高的QE值。此外,它还具有高满阱、高动态范围、高灵敏度和低读出噪声等优势。这使得G3M664C在自动导星、日面摄影和月面摄影中都有着不俗的性能。
G3M664C采用索尼IMX664传感器,拥有408万像素(2688×1520)的高分辨率和1/1.8英寸的大画幅。相比传统的1080P相机,G3M664C提供了近两倍的像素数量,在保持高帧率的同时提供更宽的视场和更多的图像细节。大画幅传感器确保了优秀的光收集能力,使其成为高精度导星和高分辨率行星摄影的理想选择。
G3M664C的传感器G灵敏度为5970mv,1/30s,在550nm处具有极高的QE值(>91%)。配备红外截止滤光片后,其光谱响应范围为380-690nm。传感器采用背照式结构,相比前照式传感器具有更高的量子效率。特别值得注意的是,该传感器在红光波段仍保持优秀的响应能力,使其在Ha波段的拍摄中也有不错的表现。
G3M664C输出原生12位ADC,提供4096级灰度层次,能够捕捉细腻的色彩过渡。在8位模式下,全分辨率可达91FPS的高帧率,即使在12位模式下也能保持45FPS的帧率。相机支持硬件ROI,在1920×1080分辨率下帧率可达126FPS,非常适合高速行星摄影和lucky imaging技术。
| 分辨率 | 12-bit 输出 | 8-bit 输出 | ||
|---|---|---|---|---|
| USB3.0 | USB2.0 | USB3.0 | USB2.0 | |
| 2688 × 1520 | 45 | 5 | 91 | 9 |
| 1920 × 1080 | 63 | 6 | 126 | 12 |
单位:帧/秒 (FPS)
G3M664C相机内置帧缓存,有助于保持数据传输的稳定性,并有效减少辉光现象。图像数据能被缓存,无需将数据匆忙发送到接收端。这能保证在多台相机同时工作的情况下,每台相机依然能达到最大帧率。对于需要多相机协同工作的应用场景,如多通道成像或立体视觉系统,这一特性尤为重要。
G3M664C支持从 1×1 到 8×8 的软件像素合并。虽然软件合并不会提高帧率,但能够有效提升信噪比,在拍摄暗弱天体时特别有用。通过合并相邻像素,可以在牺牲一定分辨率的情况下获得更高的灵敏度和更低的噪声,这对于导星应用特别有价值。
G3M664C支持 HCG(高转换增益)、LCG(低转换增益)和HDR(高动态范围)三种模式切换。HCG模式优化了弱光性能,实现0.69e⁻的超低读取噪声;LCG模式提供38ke⁻的大满井容量,适合高亮度目标;HDR模式智能结合两种增益模式的优势,在单次曝光中实现更宽的动态范围,特别适合拍摄亮度差异极大的天体目标。
G3M664C凭借其高分辨率、低读取噪声和内置ST4接口,成为优秀的导星相机选择。2688×1520的分辨率提供了更大的导星视场,有助于找到合适的导星。0.69e⁻的超低读取噪声确保即使在短曝光时间内也能检测到暗弱的导星。内置的ST4接口可以直接连接赤道仪,实现精确的导星控制。
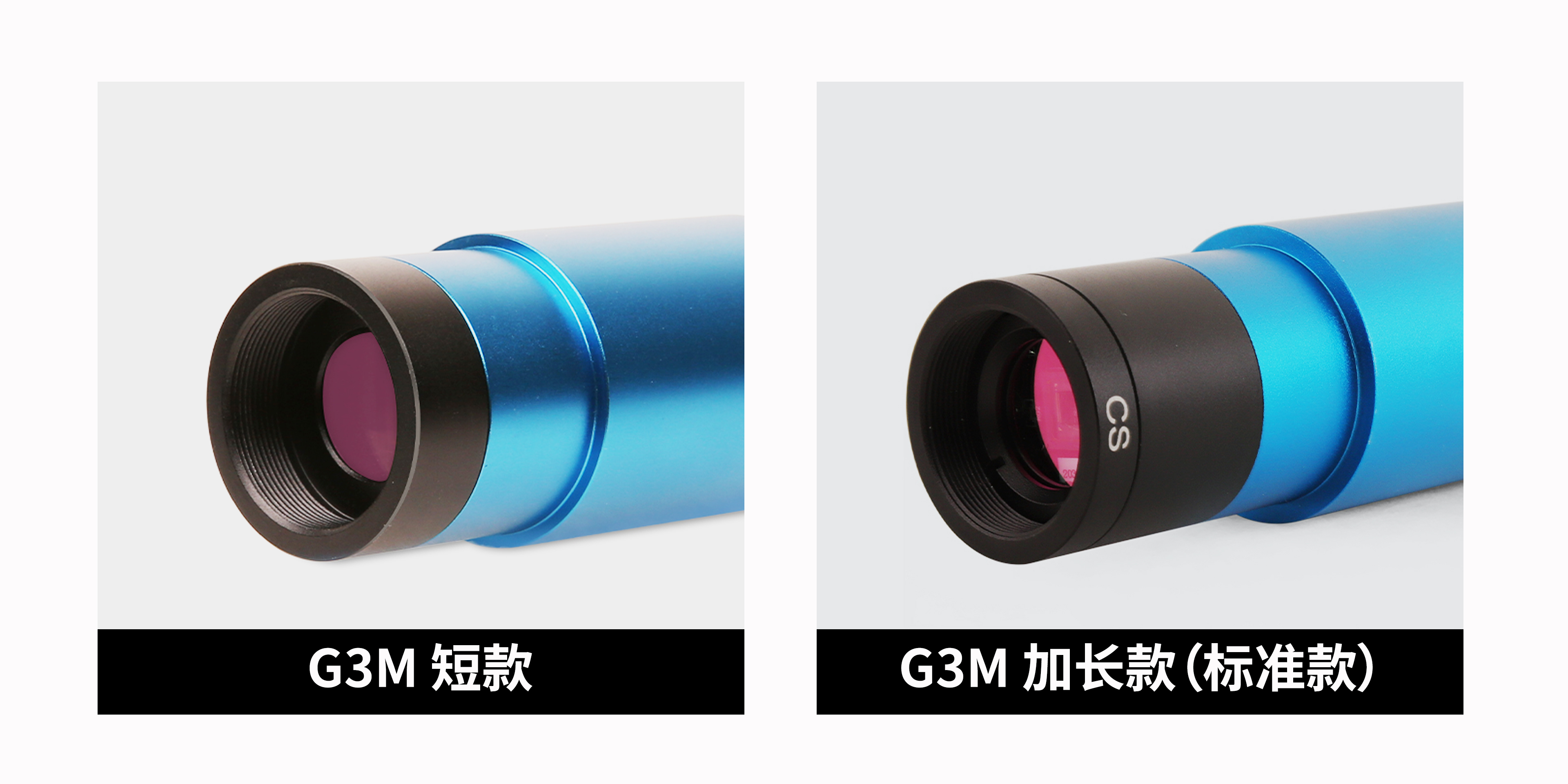
相机设计紧凑,直径仅37mm,重量仅70克,适合各种望远镜系统。
相机通过USB 3.0接口供电,使用USB 3.0数据线与主控系统建立连接后,就能实现对该相机的控制。无需额外电源,简化了野外拍摄的设备配置。
| 最大帧率 (USB 3.0) |
12位:45 FPS @ 2688×1520 8位:91 FPS @ 2688×1520 8位:126 FPS @ 1920×1080 |
|---|---|
| 读取噪声 | 0.69e⁻ (HCG模式) - 2.67e⁻ (LCG模式) |
| 满井电荷 | 38ke⁻ |
| 量子效率峰值 | >91% |
| 动态范围 | 75.8 dB |
| 信噪比 | 45.8 dB |
| 曝光时间范围 | 0.1毫秒 - 1000秒 |
| 增益范围 | 1× - 500× |
| 传感器 | 索尼 IMX664 彩色背照式 CMOS |
|---|---|
| 图像分辨率 | 408万像素 (2688×1520) |
| 像素尺寸 | 2.9μm × 2.9μm |
| 传感器尺寸 | 1/1.8英寸 (对角线 8.93mm) |
| 成像区域 | 7.84mm × 4.45mm |
| 快门类型 | 滚动快门 |
| ADC位深 | 12位 |
| 帧缓存 | 内置 |
| 光谱响应范围 | 380-690nm(带红外截止玻璃) |
| 数据接口 | USB 3.0 / USB 2.0 |
|---|---|
| 相机接口 | 1.25英寸外径适配望远镜 标准C接口适配工业镜头 |
| 后截距 | 相机本体:8.5mm 安装C接口适配器后:17.5mm |
| 外形尺寸 | 直径 37mm × 高度 72.4mm |
| 重量 | 70克 |
| 散热方式 | 被动散热 |
| 支持系统 | Windows XP/Vista/7/8/10/11 Mac OS X、Linux |
| SDK支持 | Native C/C++、C#/VB.NET、Python Java、DirectShow、Twain等 |
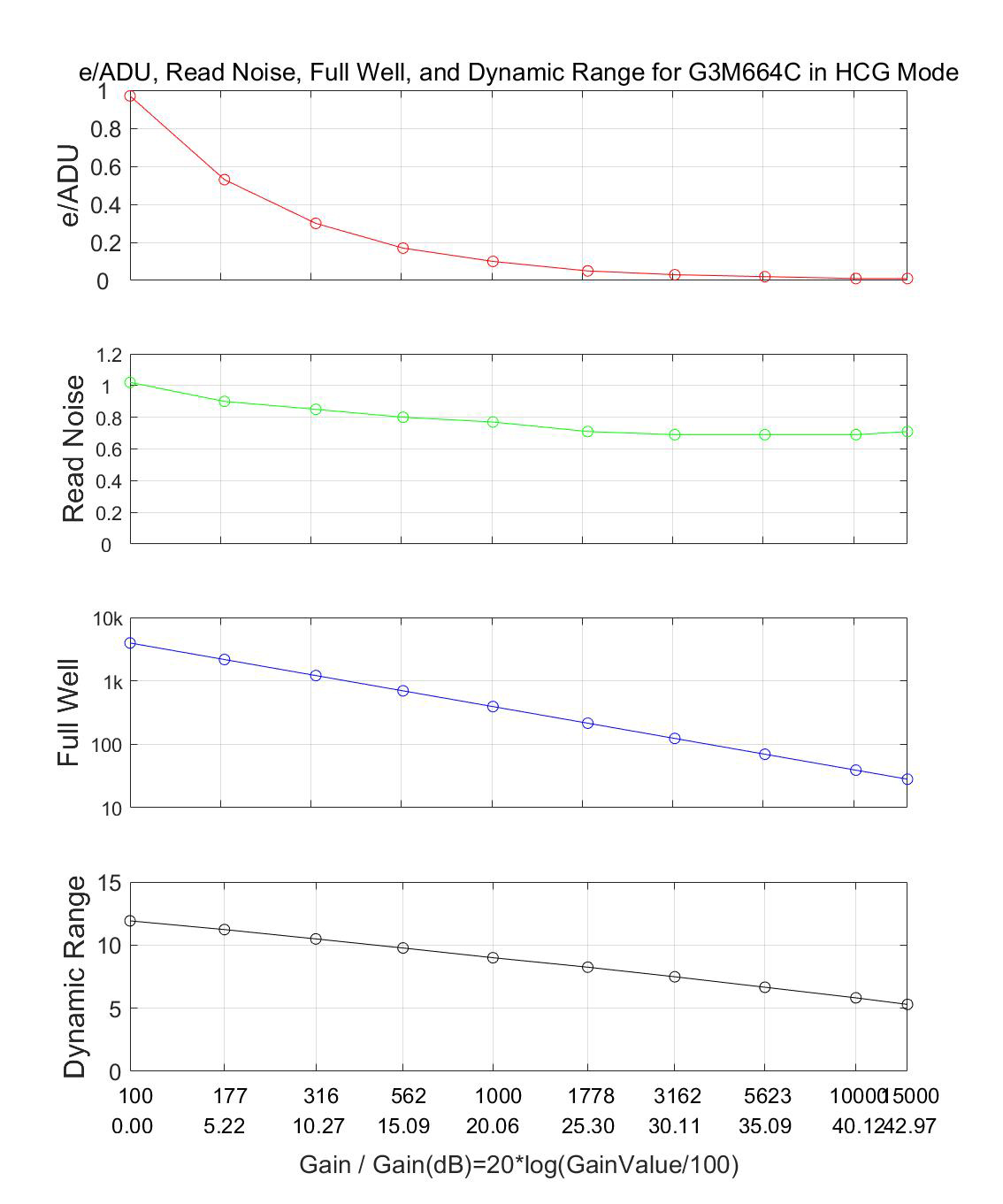
G3M664C支持HCG(高转换增益)、LCG(低转换增益)和HDR模式切换。根据您的成像需求自由配置这些模式,以优化动态范围和噪声性能。
相机设置:全分辨率,RAW 12位模式
HCG(高转换增益)模式专为弱光天体摄影优化。图表展示了在不同增益设置下的性能表现: 读取噪声可低至0.69e⁻,非常适合拍摄暗弱的导星和行星细节。虽然满井容量相对较小(4.0ke⁻), 但极低的读取噪声使其成为短曝光成像和导星应用的理想选择。

相机设置:全分辨率,RAW 12位模式
LCG(低转换增益)模式提供更大的满井容量(38.3ke⁻),适合拍摄高动态范围的天体。 该模式在拍摄太阳表面、明亮行星如木星和金星时表现优异,能够保留更多的亮部细节, 避免过曝。动态范围可达75.8dB,确保同时捕捉亮部和暗部细节。