内嵌ST4自动导星接口
GPM662C内置标准ST4导星接口,可以直接连接到赤道仪的ST4导星端口,无需额外的转接设备。这种设计简化了导星系统的配置,减少了线缆连接,提高了系统的可靠性。配合主流导星软件如PHD2、MetaGuide等,实现精准的自动导星控制。
搭载索尼 IMX662 最新一代背照式 CMOS传感器的专业彩色导星相机,具备超低读取噪声和卓越的红外响应能力,为精确导星和行星成像提供顶级性能。

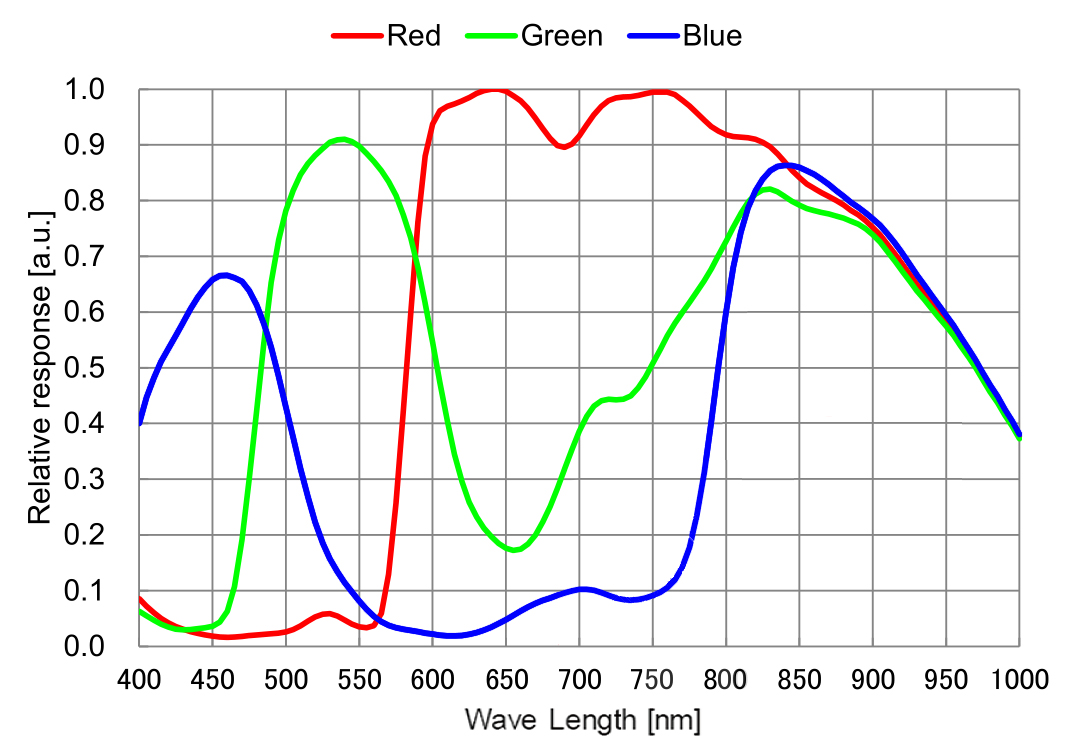
GPM662C相机搭载索尼最新的IMX662传感器,具有高效的红外波段光捕捉能力,其在650nm处具有非常高的QE值,峰值量子效率超过91%。配备HCG/LCG双增益模式切换,最低读取噪声可达0.48e⁻,是目前市场上读取噪声最低的彩色导星相机之一。高达39ke⁻的满井容量和75.2dB的动态范围,使得GPM662C在自动导星、日面摄影和月面摄影中都有着卓越的性能表现。
GPM662C采用索尼最新的IMX662传感器,相比前代IMX462有显著提升。读取噪声降低至0.48e⁻,满井容量提升至39ke⁻,动态范围达到75.2dB。这些改进使GPM662C成为目前性能最优异的彩色导星相机之一,特别适合需要高动态范围和极低噪声的应用场景。
GPM662C的传感器G灵敏度为5970mv,1/30s。其光谱响应范围达380-690nm(带红外截止玻璃),在650nm处具有极高的量子效率,峰值量子效率超过91%。这种优异的光谱响应特性确保了在各种观测条件下都能获得稳定的导星性能,特别是在红光波段表现卓越。
GPM662C支持HCG(高转换增益)和LCG(低转换增益)两种模式切换,为不同的导星场景提供最优化的性能表现:
帧缓存是相机内置的高速存储器,用于临时存储采集到的图像数据。它就像一个智能的"缓冲区",在传感器和计算机之间起到桥梁作用。
GPM662C采用原生12位ADC,提供4096级灰度层次,相比8位的256级灰度,能够捕捉更丰富的图像细节。相机支持硬件ROI(感兴趣区域)功能,ROI尺寸越小,帧率越高,这在导星应用中特别有用,可以只选择包含导星的小区域进行高速采集。
| 分辨率 | 位深模式 | |
|---|---|---|
| 12-bit ADC | 8-bit ADC | |
| 1920 × 1080 | 8.9 | 17.8 |
单位:帧/秒 (FPS) - USB2.0接口
GPM662C支持从 1×1 到 8×8 的数字像素合并(堆叠或平均方法)。像素合并技术可以提高信噪比,在暗弱导星条件下特别有用,通过合并相邻像素来增强导星信号,同时降低读取噪声的影响。
GPM662C内置标准ST4导星接口,可以直接连接到赤道仪的ST4导星端口,无需额外的转接设备。这种设计简化了导星系统的配置,减少了线缆连接,提高了系统的可靠性。配合主流导星软件如PHD2、MetaGuide等,实现精准的自动导星控制。

GPM662C支持Native、ASCOM、WDM等多种驱动接口,兼容PHD Guiding、N.I.N.A、INDI、MaxIm DL、Nebulosity、MetaGuide等主流天文软件。提供Windows、Linux、macOS等多平台SDK支持,包括Native C/C++、C#/VB.NET、Python、Java等开发接口。
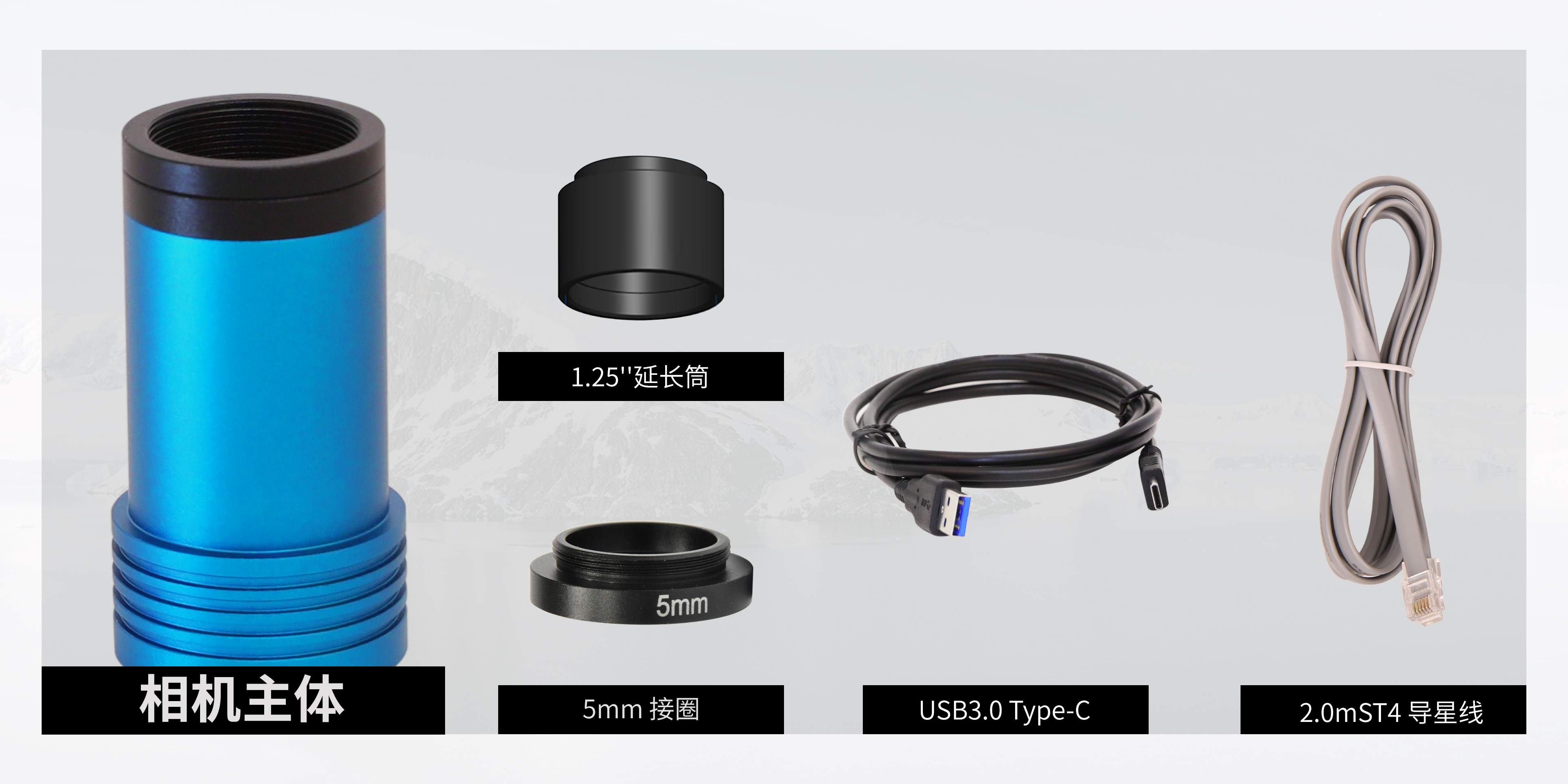
相机通过USB 2.0 Type-C接口获取供电,无需外接电源。一旦使用USB数据线与主控系统建立连接,该相机即准备好进行工作。这种设计特别适合野外观测,减少了电源线缆的复杂性。
GPM662C提供HCG和LCG两种增益模式,可根据不同的导星需求灵活切换,在各种条件下都能提供优异的性能表现。
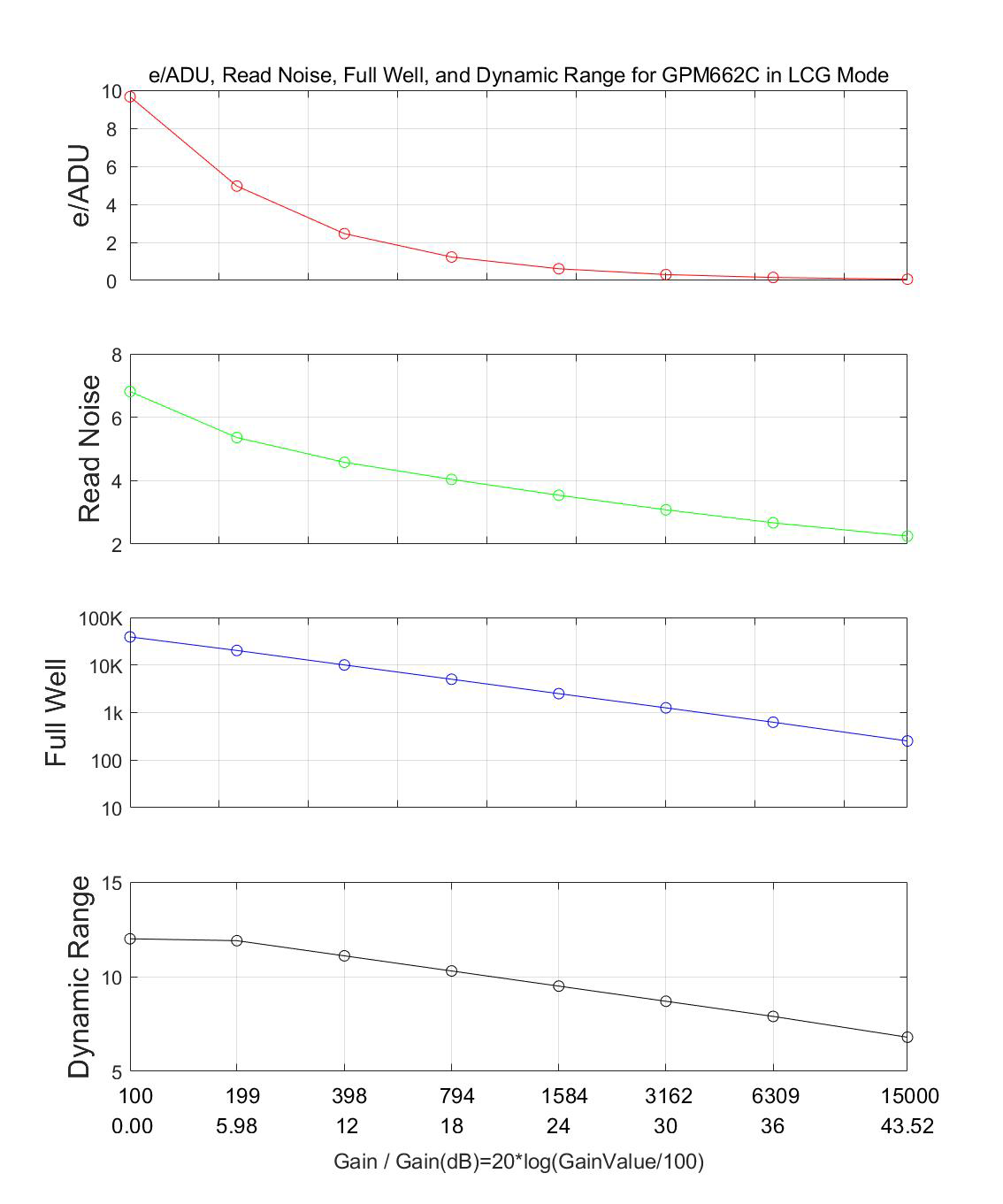
相机设置:全分辨率,RAW 12位模式,LCG模式
LCG模式提供超大的满井容量(39.034ke⁻),是目前同类产品中最高的。 该模式在保持良好信噪比的同时,提供了极宽的动态范围(75.2dB), 能够避免在明亮目标上过曝,特别适合日面、月面摄影和明亮行星成像。
| 增益值 | 100 | 398 | 1584 | 6309 | 15000 |
|---|---|---|---|---|---|
| 对数增益 (dB) | 0.00 | 12 | 24 | 36 | 43.52 |
| e-/ADU | 9.659 | 2.46 | 0.614 | 0.154 | 0.062 |
| 读出噪声 (e⁻) | 6.81 | 4.58 | 3.54 | 2.67 | 2.25 |
| 满井电荷 (ke⁻) | 39.034 | 10.035 | 2.503 | 0.627 | 0.253 |
| 动态范围 (stop) | 12 | 11.1 | 9.5 | 7.9 | 6.8 |
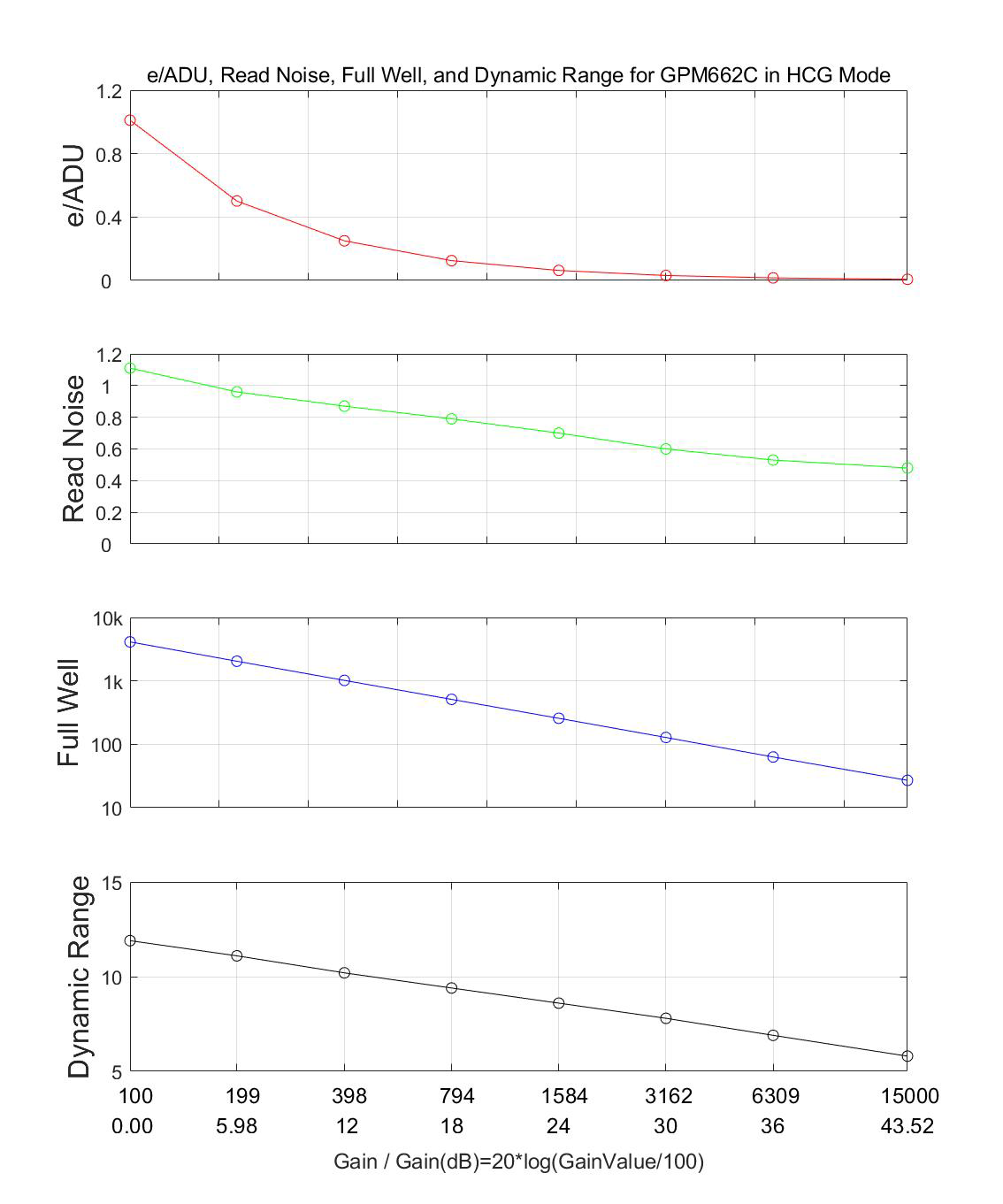
相机设置:全分辨率,RAW 12位模式,HCG模式
HCG模式专为弱光导星优化,提供极低的读取噪声(最低0.48e⁻), 这是目前彩色导星相机中的最低水平。在高增益设置下,读取噪声保持在0.48e⁻, 非常适合捕捉极其暗弱的导星,在深空天体拍摄中表现尤为出色。
| 增益值 | 100 | 398 | 1584 | 6309 | 15000 |
|---|---|---|---|---|---|
| 对数增益 (dB) | 0.00 | 12 | 24 | 36 | 43.52 |
| e-/ADU | 1.011 | 0.25 | 0.063 | 0.016 | 0.007 |
| 读出噪声 (e⁻) | 1.11 | 0.87 | 0.70 | 0.53 | 0.48 |
| 满井电荷 (ke⁻) | 4.123 | 1.018 | 0.257 | 0.063 | 0.027 |
| 动态范围 (stop) | 11.9 | 10.2 | 8.6 | 6.9 | 5.8 |
| 最大帧率 (USB 2.0) |
12位:8.9 FPS @ 1920×1080 8位:17.8 FPS @ 1920×1080 |
|---|---|
| 读取噪声 | HCG: 0.48-1.11e⁻ | LCG: 2.25-6.81e⁻ |
| 满井电荷 | HCG: 4.123ke⁻ | LCG: 39.034ke⁻ |
| 量子效率峰值 | >91% |
| 动态范围 | 75.2 dB |
| 信噪比 | 45.9 dB |
| 曝光时间范围 | 0.1毫秒 - 1000秒 |
| 增益范围 | 1× - 150× |
| 传感器 | 索尼 IMX662 彩色背照式 CMOS |
|---|---|
| 图像分辨率 | 210万像素 (1920×1080) |
| 像素尺寸 | 2.9μm × 2.9μm |
| 传感器尺寸 | 1/2.8英寸 (对角线 6.45mm) |
| 成像区域 | 5.57mm × 3.13mm |
| 快门类型 | 卷帘快门 |
| ADC位深 | 12位 |
| 帧缓存 | 内置 |
| 增益模式 | HCG/LCG双模式切换 |
| 光谱响应范围 | 380-690nm(带红外截止玻璃) |
| 数据接口 | USB 2.0 Type-C |
|---|---|
| 导星接口 | 内嵌ST4自动导星接口 |
| 相机接口 | 1.25英寸外径适配望远镜 标准CS接口适配工业镜头 |
| 后截距 | 8.5mm(搭配C接口达17.5mm,搭配CS接口达12.5mm) |
| 保护窗口 | 红外截止滤光片/增透窗口 |
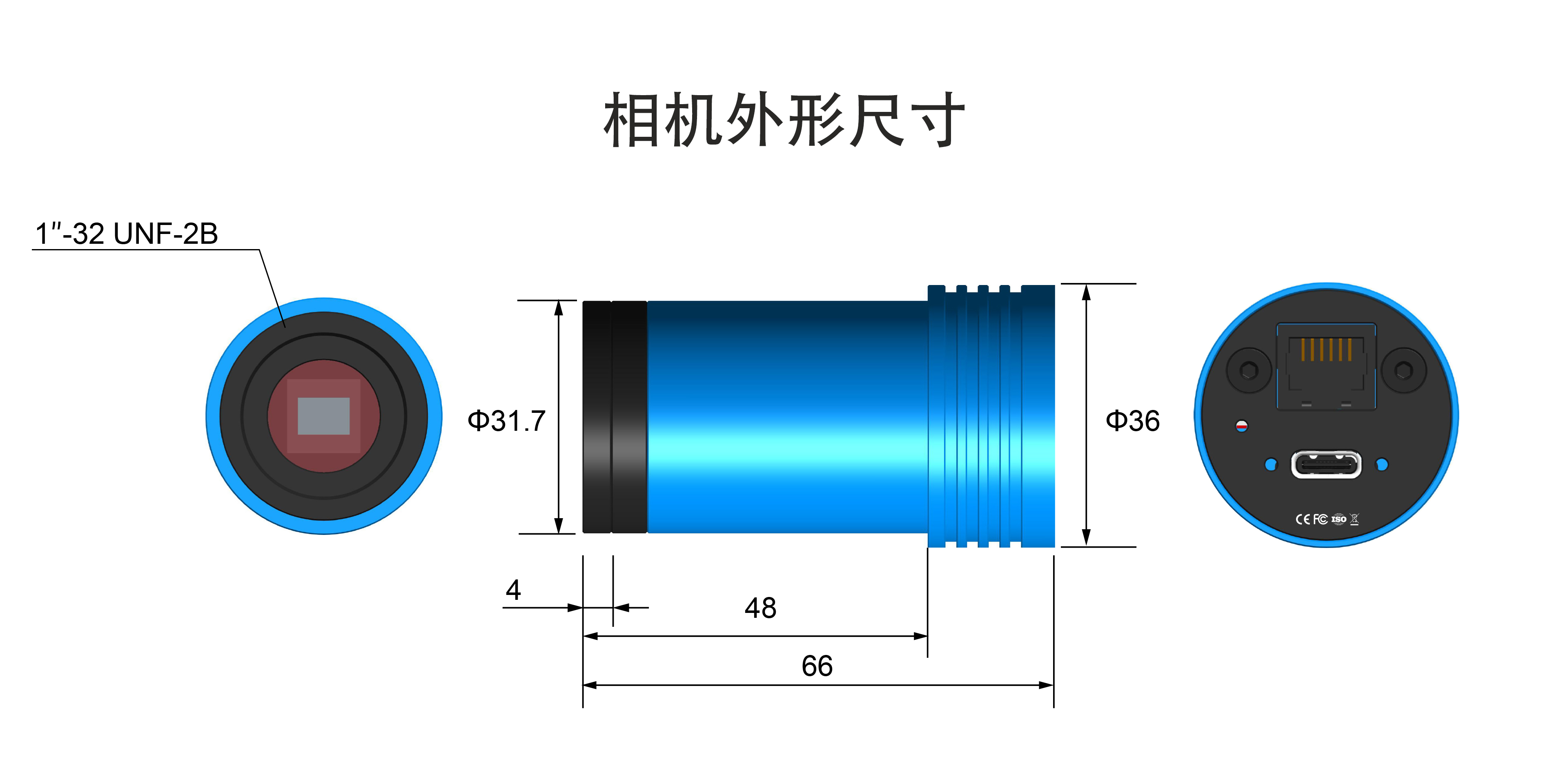
| 外形尺寸 | 直径 37mm × 高度 72.4mm |
| 重量 | 65.3克 |
| 散热方式 | 被动散热 |
| 支持系统 | Windows XP/Vista/7/8/10/11 Mac OS X、Linux |
| SDK支持 | Native C/C++、C#/VB.NET、Python Java、DirectShow、Twain等 |
包装盒尺寸:长19.5cm × 宽16cm × 高6cm(每个成品包装约总重0.8-1.0千克)